CRUX200MFのTitanTCSコントローラーでのPECについて、正常に機能しているのか疑問になる現象が発生しています。
これは私の機器構成やパラメータ設定関係で発生しているのかも知れませんが、詳細は分かりません。
またネットでのこのTitanTCS PECに関する記述も調べた中(知らない所に有るのかもしれませんが)ではノウハウ情報は無く改善方法は不明です。PEC機能に関した他の情報に解決策があるかも知れません。
現状私の機器構成は下記です。
1)赤道儀:CRX200MF+TitanTCS、殆どDefaultでの使用
2)ガイド鏡&ガイド用カメラ:Askar FMA180+QHY5III678M
3)PHD2:Version2.6.13、キャリブレーションはDefaultパラメータで実施。露出は2秒、赤緯はM33を対象に実施しており、あまり適切では無いかも知れません。
尚、露出の2秒が長すぎるのかもしれません。Hobym社のPECのビデオを見ると露出は0.5秒となっていました。PEC Trainingでは赤道儀自体の固有PEを検出&修正するので、PHD2からの修正周期は短い方が、ズレを早期に検知すると言った意味から良いのかもしれません。自分としては、この辺りではないかと推測しています。可能なら、0.1秒とか0.2秒でも実施して見たいと思います。但し、実際のガイド時は別と思います。TitanTCSマニュアルではオートガイドをしている状態での指定だけで、露出やガイドスピードに関する説明は無いですね。
又、ガイドスピードはDefaultの0.5xとなっています。TitanTCSのFAQを見ると長焦点の場合は小さ目の値と言った記述もありました。
再度のPEC Trainingを実施するとして、PHD2の露出は0.5秒を指定し、ガイドスピードを少し小さ目0.3xとかにして再トライ方向とします。しかし、ガイドスピードはASCOMドライバには表示だけなのでコントローラーからの操作かも知れませんので、リモート対応の場合は0.5x のままTrainingです。
以下、現状でのPEC Training中、終了、Enableでのガイド、Disableでのガイドの状況は下記の状態です。
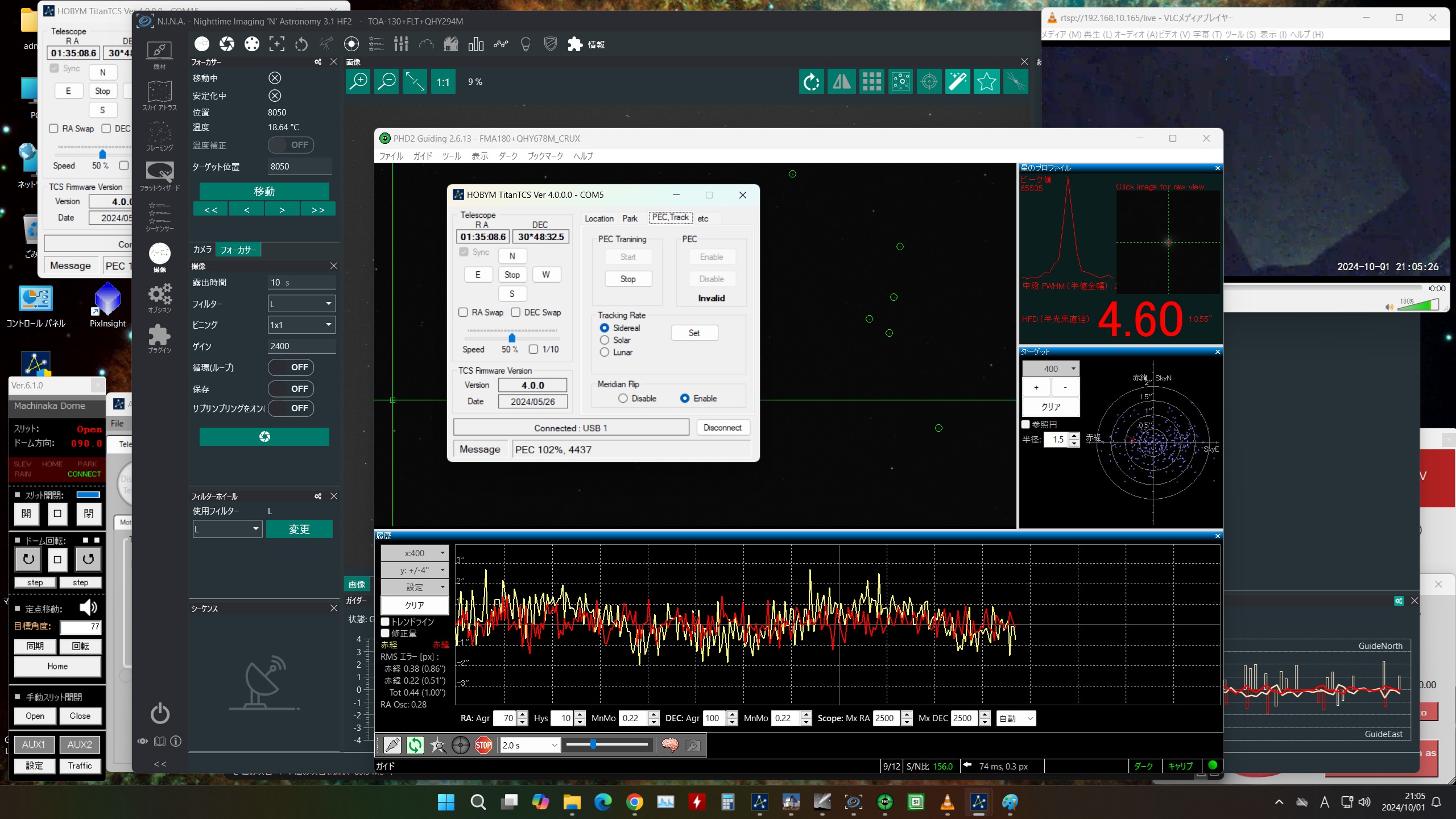
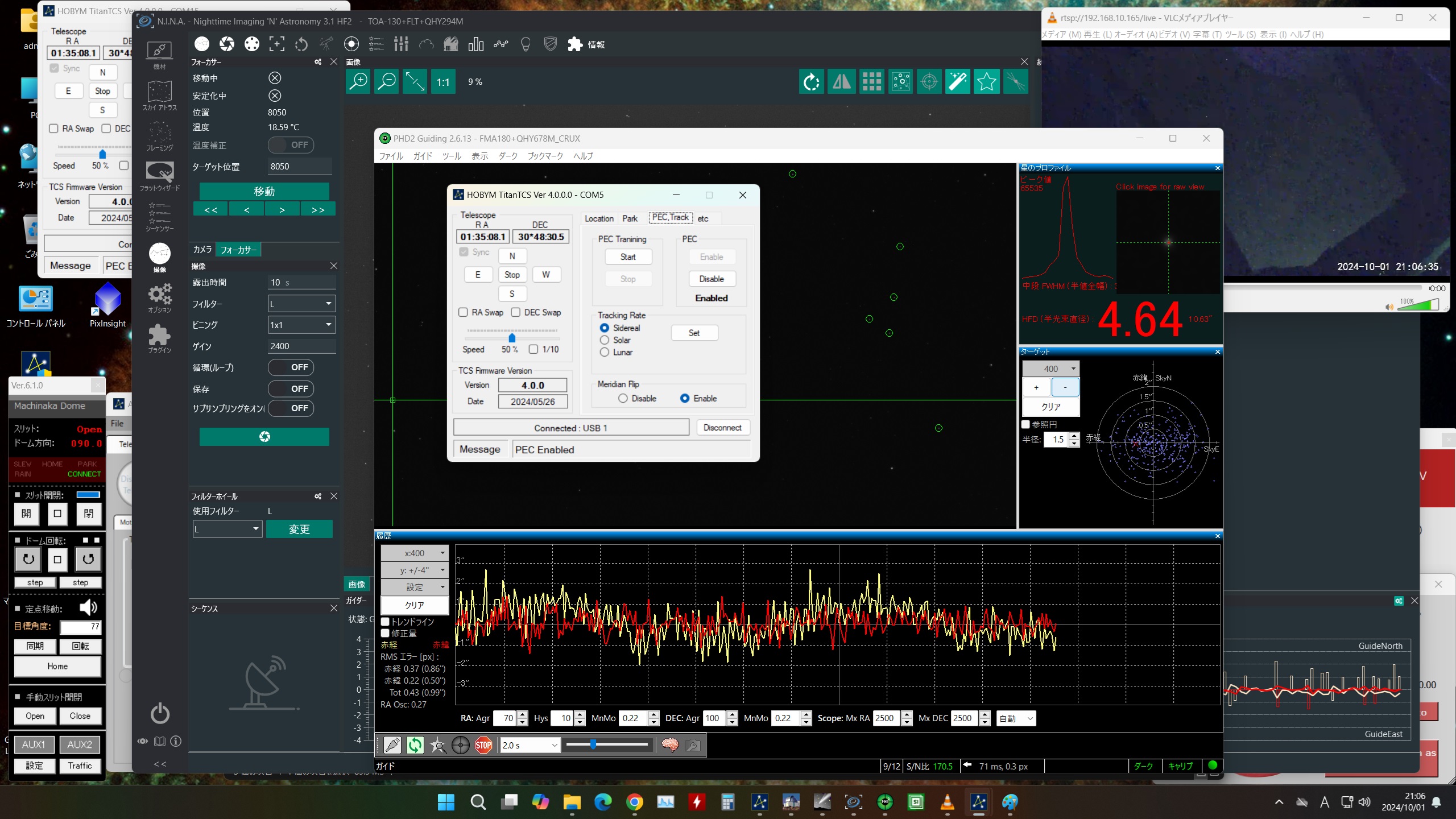
トレーニング中から終了にてEnableになった。最初の画像の続きになっています。
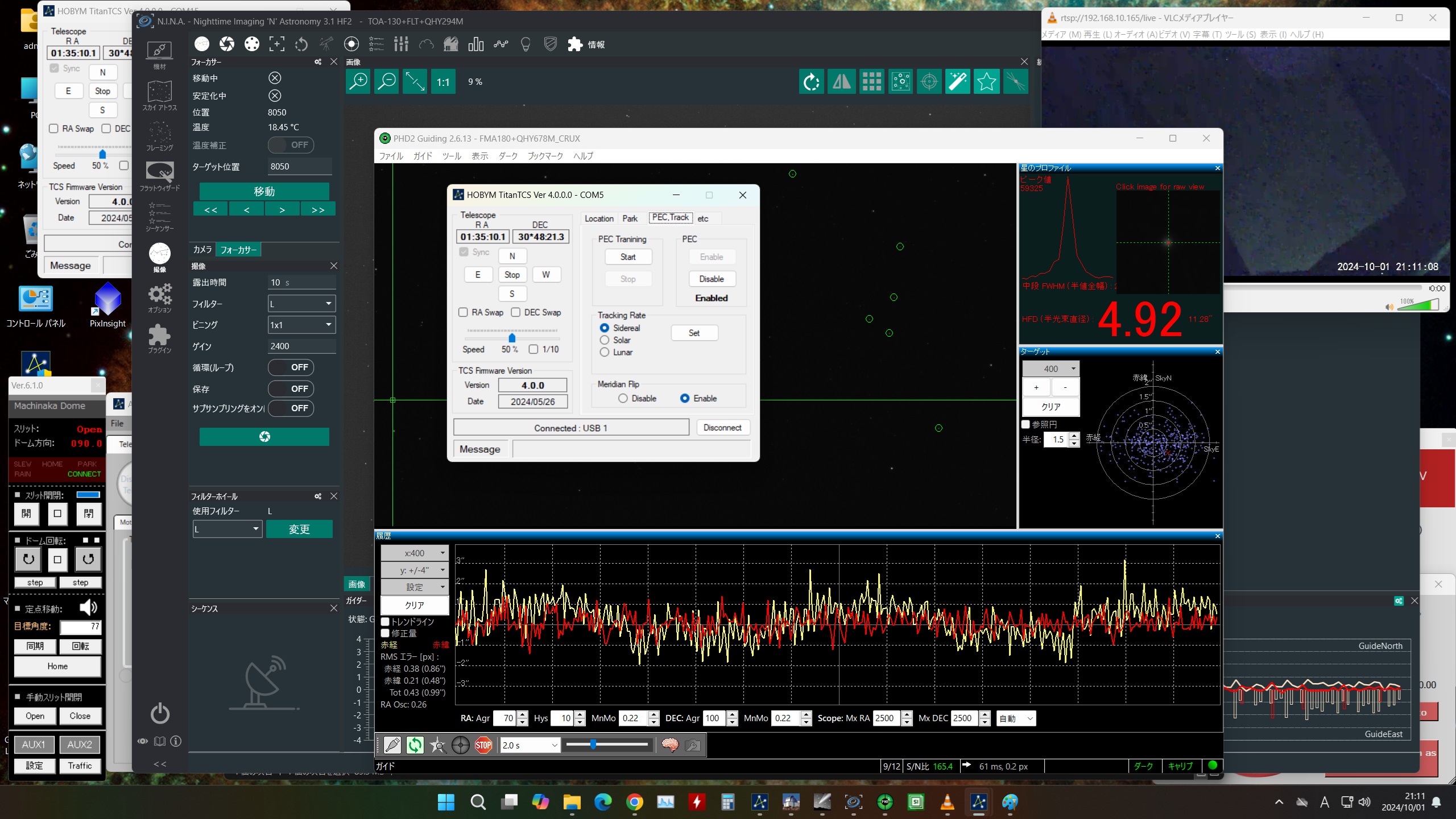
Enableでは若干振幅の振れが大きく、PECが効いているように思えない。
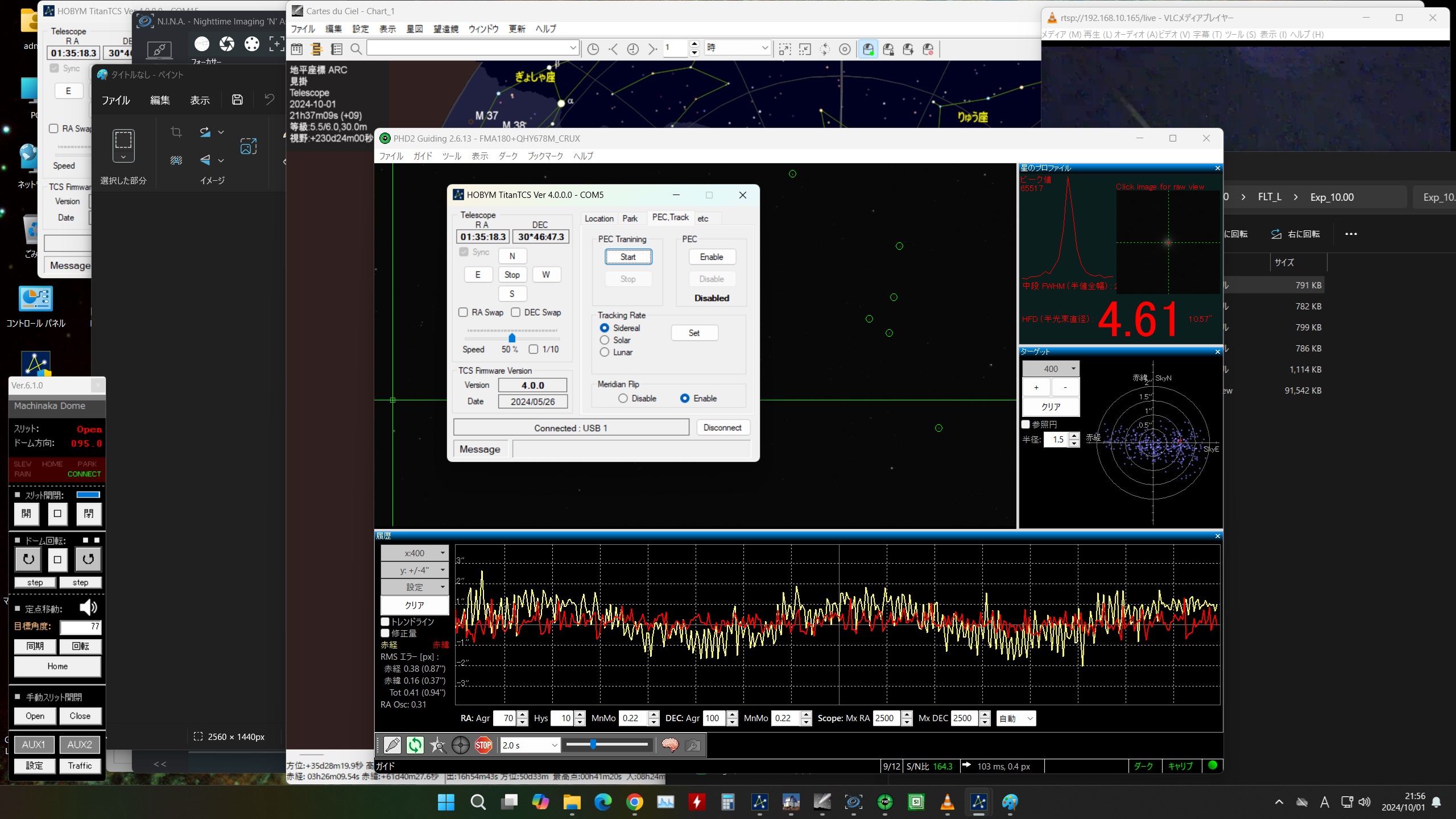
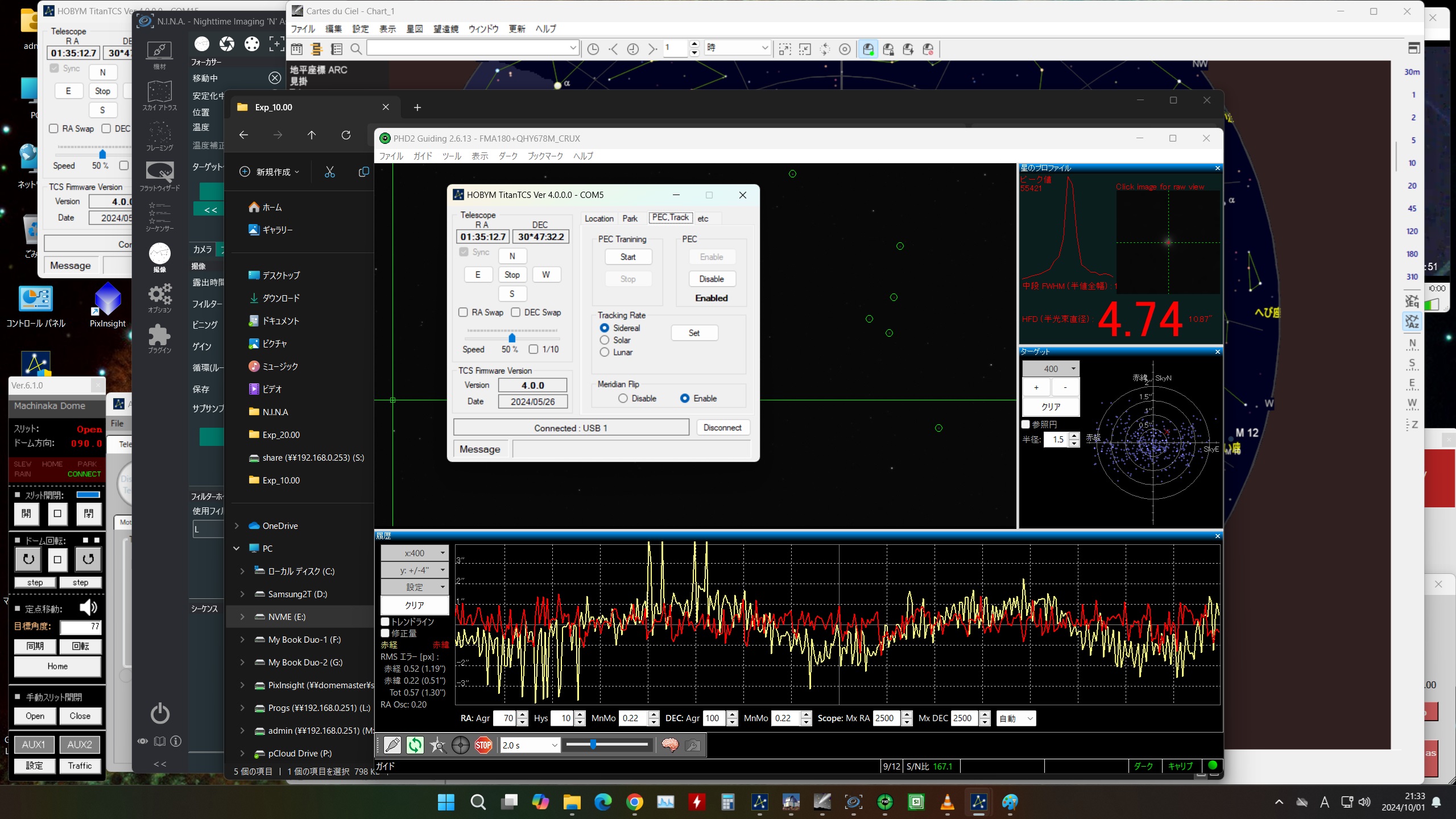
上記画像の状況ではDisableの方がRMS値が若干よく、振幅も小さいように感じます。
2024/10/9 追記
今夜はよく晴れて、再試験をしてみました。露出を0.2秒、0.5秒で学習してEnableにしても傾向は変わらず、多少RMSが良いかなといった感じ程度。現状Disableで継続することにしました。ただPHD2のアルゴリズムのPPECと言うのがあるのですが、学習とその反映が分からず途中で止めています。
2024/10/10 追記
昨夜の天体撮影では、最終的にPHD2のPPECが良さそうな感触を得ました。但し、PPECはその学習情報がどこかに保存されて再利用されるような感じではないように見えます。当該ファイルらしきものが見当たらない、レジストリをPHD2(別の言葉かも)で検索しても当たらないでした。取り敢えず、撮影初期にダミーの感じでガイドをして、その後継続的にガイドすると言った使い方でしょうか?しかし、対象が変わったときが疑問ではあります。やはり、TitanTCSのPECが正常に稼働するのが一番です。
コメント