N.I.N.A.ではドームと赤道儀の同期(望遠鏡の向きとドームスリット方向を合わせる)の設定が出来ます。設定は N.I.N.A.のオプション機能のドームで設定します。
N.I.N.Aでのドーム・赤道儀同期は結構機能が高く、望遠鏡を複数同架する場合も考慮されており、N.I.N.A.の元々の複数プロファイルも有って望遠鏡毎に同期パラメータの設定が可能となっており、非常に役に立っています。
しかし、実際には自分が設定内容を良く把握して設定していないため、トライ&エラー的な面が多くあります。N.I.N.A.が良くないでなく、私が杜撰なだけですね。
そこで、オプションパラメータの意味(こんなだよなの感じで)と実際の計測位置はこんなだろうと以下残しておきたいと思います。オプションのドーム赤道儀同期パラメータは大体以下のような感じです。
1)スコープポジションN/S
ドーム中心と架台の中心(赤経軸と赤緯軸の交点)のオフセット値。+は北方向
私の架台は、北に若干オフセットしている。
2)スコープポジションE/W
ドーム中心と架台の中心(赤経軸と赤緯軸の交点)のオフセット値。+は東方向。
私の架台は特にオフセット無し。
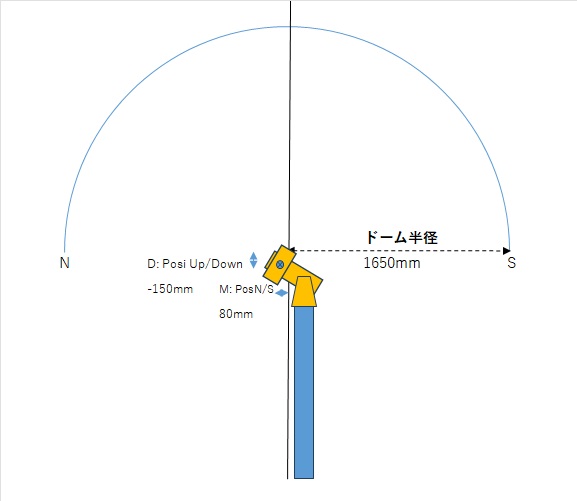
3)スコープポジション+Up/-Down
ドームベースの水平面と架台の中心(赤経軸と赤緯軸の交点)のオフセット値。+は上にある。
私の架台は少し沈んでおり、マイナスオフセットです。
4)ドーム半径
ドーム中心からスリットまでの距離とした方が良いかもしれません。スリット幅が無いのもどうなのでしょうか?
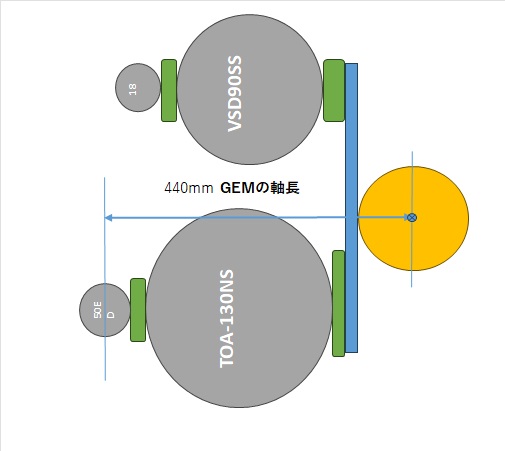
5)GEMの軸長
これが少し厄介。望遠鏡を赤経±90℃旋回し、回転軸から望遠鏡開口部中心までの距離。しかし、此れにはガイド鏡を考える必要があるようです。望遠鏡よりガイド鏡が外にある時は、そのガイド鏡の開口部中心と見るようです。ここは結構シビアに回転に関係しているようです。
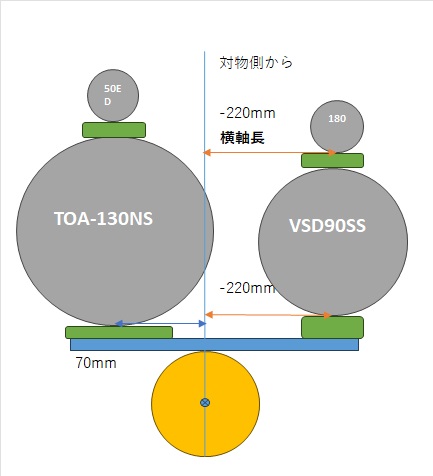
6)横軸長
アリミゾから鏡筒中心までの横方向距離。接眼から見て右側がプラス値。
自分は以下の感じで設定しています。調子見て変わるかも知れませんが。
この設定で上手くゆくかこれから検証兼ね実施です。
VSD90SSとFMA180Proはガイド鏡(50EDPH)と離れているのでスリット端になったりしないか心配です。
2024/12/10 修正
ドーム半径はやはり1500mmの方に変更。スリット幅が同じだと、短い目の方が回転が大まかになり塞ぐようにはならないと想定。又、FMA180 Proでの撮影時にスリット端に近くなり、1500mm変更で離れたので当面変更して様子見としています。
又、回転して少しして若干逆回転とか不思議な動きをしています。N.I.N.A.側の制御かドームコントローラーアプリ側か不明です。ドームコントローラーアプリだと角度センサーと内部角度が違うと戻ったりしますが、センサー位置ではないと思われるのでN.I.N.A.だろうか??
追記:FMA180 Proにて、スリット端にてケラレが発生。この値群ではダメなようす。ピアサイド西で方位角138度、高度42度で東側スリット端に接触の感じ。
スコープポジション+Up/-Downが小さすぎた感じ。回転帯目安で測定したがスリット端の方がドーム底と見做せるのでその分を加算して考慮。150mm → 250mm。これで再度様子見。しかし、これでもスリット端に近く、もっと中心側へと期待したいものだが分からず。この変更もダメでした。
ドーム内モニターカメラを見ると、どうもドームコントローラーアプリでの方位がおかしい様子。方角的に180度近いのですが、158度。N.I.N.Aのオプション値よりドームコントローラーアプリでの方位認識を見直した方が良い感じ。しかし、方位センサー4つ入れているのですが、ダメな感じです。回転エンコーダーでの角度当たりのカウントと実際に微角移動での方位認識が違っているのだろうと推測(誤差拡大)。方位相違の為角度センサーを追加しているのですが、難しいところです。若しかしたら回転、逆回転とかの関係で誤差拡大なのかもしれません。それでも方位158度と180度以上ではどうして?
現状の構成では、ドーム&赤道儀同期は難しい感じです。マダマダ手放しは無理な感じです。
私案としては、角度バーコードを2度や5度間隔に置き、バーコードリーダー(M5を想定)で通信してコントローラーに入力して、より正確な角度認識をしたいところです。
N.I.N.A.のドームオプションパラメーターの値の成否は分からないですね。
2024/12/11 追記
方位のズレが小さいなどの時は良く追従している感じ。ドームの方位ズレが少なくなる改良が必要な感じです。又、今夜はドーム正回転(右回転)、逆回転(左回転)の動きが余りなく進行しているのもあるのかも知れません。と見ている間に再度方位が大きくずれて戻りがありました、ドーム方位認識が一番の問題のようです。案として考えている方位のバーコードorQRコード方式を実装(と言ってもアプリには出来ないのでアプリにある方位情報入力部と同期のボタンを操作する外付けスクリプトかなんかで対応かと)。バーコード等の読みはM5(BLE通知使用かな?)を利用予定(ものは購入済み)。
これの対応の他に、今のドーム同期は2度相違で移動なのを5度にして余裕を持たせる事も実施してみる。細かい移動が無くなるので若しかしたら誤差が小さくなり実用出来るかもしれない。


コメント