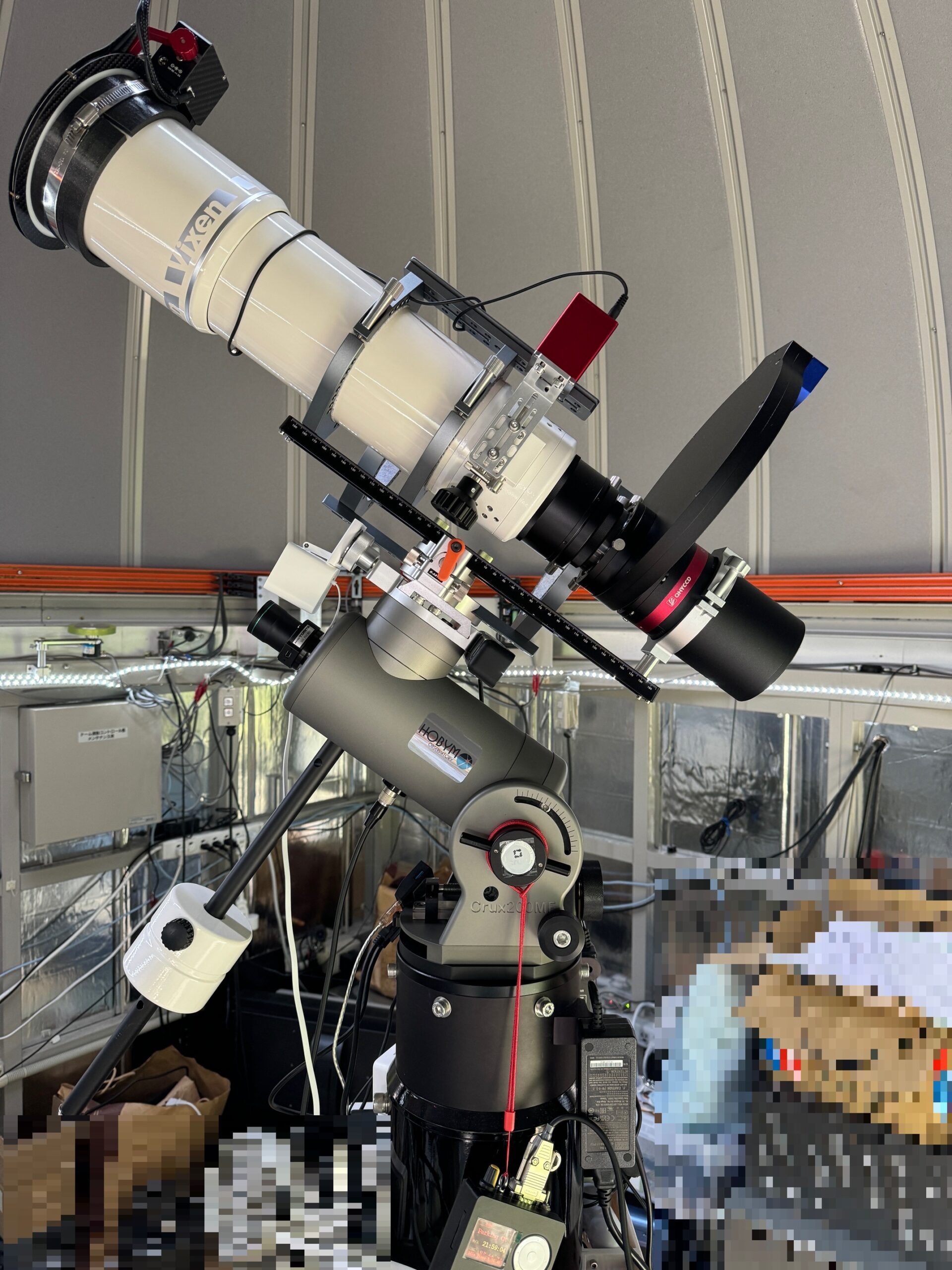
富士ヶ嶺ドームに新しい赤道儀 CRUX200MF+Titan TCSをピラー脚に搭載しました。赤道儀自体の重量は10kg程ですが、シンプル&スマートですが結構堅牢な感じで良いです。ハーモニックドライブ赤道儀は概してスマートですね。

コントローラーはTitan TCSといい、小型ですが重さもそこそこあり此方も堅牢な感じで質感も大変良いですね。未だ極軸調整とPEC学習程度でしか行っていないですが、若干使用した感じを書きたいと思います。
1.CRUX200MF
方位と高度調整は良く出来た感じで、調整後の固定(ねじ止め)でも極軸の移動は若干な感じでほぼ無い感じに等しいくらいです。良く出来た固定機能ですね。ただ粗動での方位移動がなぜか余りスムーズでない(多少カクカク)点がありますが、支障は無いですね。
今回極軸調整にはPoleMasterを使用して行ったのですが、回転ではクランプ方式でないので粗動回転の為に通電状態(トラッキング)で実施しました。これはハーモニックドライブ系では通常と思います(MX-HDはクランプフリーがありますが)。
この通電状態(トラッキング)で調整していて、PoleMaster調整最後の天の北極軸と架台極軸の最終方位、高度決めで結構架台極軸が振れている(枠からはみ出る事はないです)ことが分かりました。トラッキング状態の為ハーモニックギア系の駆動が影響して見えているのかも知れません。若しかしたらパークを実施するか通電Offとした方が良いのかも知れません。
最終段階をパーク状態にして再度極軸調整を実施するつもりです。パークでも振れるのであれば通電Offとして調整(静止状態で極軸を合わせるため)。
2.TitanTCS
此方は、K-ASTEC殿の赤道儀改造で結構単体レベルでは利用者が多いと思いますが、ネットで検索しても余り情報が無いのが不思議です。PEC学習と補正が出来る点がありますが、自分としてこのTitanTCSの良い点としては、シリアル通信経路が複数(5経路)ある点です。
現在は、N.I.N.A、PHD2、SkyChartと使用するアプリが3種以上同時にあるので、これらアプリに個別に接続できる点が良いと考えています。ASCOMなら DeviceHub(旧だとPOTH)があり多重接続できますが、以前のPHD2キャリブレーションでの不具合(POTHですが)から、これらを使うより直接接続系の方が安定するのではと考えているからです。
2024/8/10 Hobym Observatory社確認追記
天文ハウスTOMITA殿経由でメーカーHobym Observatory社に複数ポートの同時利用について確認しましたが、メーカーとしては「複数ポートを同時利用するものとしては想定していない。複数ポートを同時に使えることについてはYesと言っていない」ようです。通常の自動導入とガイド信号での運用を想定している感じです。
私の運用の方針としては、制御(自動導入、ガイド制御)は同時には1ポートしか使わない様運用。またコントローラーからの通知情報(座標やステータス等)は複数ポートに出力されているだろうとの意で使用しています。
注意:ここでの私の複数ポート運用は、私の自己判断にて行っていますのでその点ご留意願います。これを見て同じように対応しトラブル、損失、損害等が発生しても、当方は一切の責任を負いかねますのでご了承ください。メーカー保証等も不明です。特にSerial Bポート用に用意するケーブル(RJ9端子)では、ピン割付と電圧誤りでコントローラーが破損する可能性もあります。
ただ、Wifiでサーバー&クライアント的に複数同時接続が可能で制御出来ればこの方が良いとは思います。しかし、多重接続制御は、テストとかも大変で余りないとは思います。
TitanTCSは制御にCPUが2つあるらしく、通信系にはどうもESP32(多分Bluetooth規格から無印ESP32辺りか、C3やS3でない)を使用している感じ。BluetoothとWifiも背反でファームウェア入替えで対応する辺りから考えても推測できます(ESP32のBluetoothはベースコードが大きいのでWifiとの共存が厳しい)。
ESP32だとシリアル端子2つは可能で、TitanTCSのSerial A&Bはこれに繋がっていると見ています(個人の勝手な推測です)。従って、Serial A、Serial B及びBluetoothがESP32で通信系(GUI系もか?)を司っているのかと思われます。実際の駆動制御は、もう一つのCPU辺りではないかと想像します。
さて、TitanTCSのUSBポートですが、これはPCと接続するとCOMポートが2つ生成されてきます。実は小生このUSB AーUSB Aの接続パターンは今回初めてです(長年自作も含めPCを使っていますが、初めてですね)。USB2系は最大480kbpsでの通信系ですから、在ってもおかしくないのでしょう。Windows11でもドライバを入れずに機能していますから。このUSBポートですが、ESP32ではUSB機能は搭載されていない(S3とかは有りますが、Bluetooth4規格は使えない)ですから、外付けLSIかもう一つのCPU(メイン機能側)機能と思われます。恐らくもう一つのCPUのUSBホスト機能(TypeA端子から)だろうと推測しています。
しかし、このUSBによるPC側COMポートは厄介です。同一ポートに複数アプリがエラーにならず使えてしまいます(正常機能動作するなら有難いですが)。2つポートの同時利用も安定するか自分としては分かりません(単に経験が無いだけです)。
もしメインCPU機能側に接続されているなら、PHD2の細かな指示は此方に直接入った方が良いように感じます(自分の勝手な想像です。違っている可能性も大)。
上記のような想像をして、今回TitanTCSのシルアル通信は以下の接続パターンで繋いでみようかと思っています。
1)N.I.N.A.(目標導入、フレーミング&撮影アプリ):Serial A
2)SkyChart(星図アプリ、赤道儀の方向確認&目標導入):Serial B(ケーブルが同梱でないので、別購入か自作。RJ9コネクタでピン割付準拠が必要)
3)PHD2(ガイドアプリ):USBポート(USBルートは2COM有りますが1ポート限定にする)
4)DeviceHub(ドームと連動の為):Bluetooth
最後のドーム連動はN.I.N.Aでも可能ですが、どうも望遠鏡大きさを考慮した高機能のものでなく、単に方位を合わせているような感じなので、望遠鏡&ドーム連動の為DeviceHubを使用する考えでいます。
望遠鏡1台だけの搭載なら良いですが、2台同架(並列同架)だと方位だけの一致では駄目で、望遠鏡の大きさ、センター偏移とドーム径とか考慮したASCOMの方が良いと思うためです。
2024/8/8 追記
USB-A to USB-A接続が気になりもう少し調べてみました。元々USB-A to USB-A接続は規定外。
Titan TCSは制御部にCortex M4Fを使用しているよう。Cortex M4Fを調べるとUSBインターフェースはHost/Deviceに使える物理IFが2chあります。しかし、USB-Aは1ポートなので実質1chだけが使えるのだろうと思われる(USB-A毎に1chとして)。USB-Aのホスト端子にしているのは、単にHost/Deviceで使えるからHost側のUSB-A端子にしているのだろうと考えます。ファームウェアでは利用法は、Device指定だろうと思われます。この点からPCから見てUSB-AのCOMポートは2つ有りますが、1ポート(若番)を使うのが良いのではないかと思われます(これは勝手な推測です)。若しかしたら2COMポートとも有効なのかも知れません。
2024/8/15 追記
SerialB用に使うUSBシリアルケーブルを購入(アリエク)したのですが、どうもTX,RXが逆みたいで使えないとなったので、SkyChartは4)のDeviceHubを共用する事にしました。
2024/8/16 追記
昨夜、極軸の再調整を行いました。最終段階の天の北極軸と架台極軸の調整ではパークにて行いました。最初は静止した状態になっていたのですが、その後再度振れる現象が出てきました。それならと電源オフ(トグルスイッチ操作)を実施しましたが、振れは止まらない状態です。この状態ではもうCRUX200MFに関係しないので、赤道儀以外が発生源だろうと思います。しかし、80kg程のピラー脚に乗せ、ピラー自体は深さ1m位のコンクリ基礎(1m角)にアンカー止め、その下は富士山の溶岩体(溶岩と言ってもゴツイ岩石集合帯)。コンクリ基礎とドーム床は分離しておりドームの何かの振動が直接大きな影響は与えないと思われます。自分もそれ程動いていないので発生源は不明です。道路の振動でもなく地震でも無く。静止安定する時もあるので諦めました。静止している時にほぼ同軸調整としました。しかし、トラッキング状態よりパークの方が良いとは思います。

コメント